EJERCICIOS DIA 03 DE OCTUBRE
Pag 37 Ejercicio 16
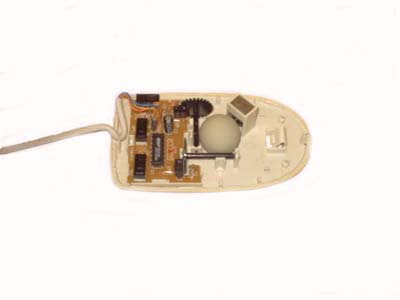
Raton mecanico
Son los mas utilizados, aunque se tiende a sustituirlos por los ópticos, su funcionamiento se basa en una bola de silicona que gira en la parte inferior del ratón a medida que lo desplazamos. Dicha bola hace contacto con 2 rodillos perpendiculares entre si, de forma que uno recoge el movimiento horizontal y otro el movimiento en sentido vertical.
En cada extremo de los ejes donde están situados los rodillos, existe una pequeña rueda con ranuras, que gira en torno a cada rodillo, y a cada lado de ambas ruedas hay un emisor de luz y al otro lado un receptor, de tal forma que cada vez que gira, el paso de luz a oscuridad es recogido por los sensores, enviado como impulsos eléctricos al controlador y este lo transforma en binario para su envió al ordenador.
Raton óptico
Agilent Technologies desarrollo en 1999 este tipo de ratón, su funcionamiento inicial era mediante un LED que enviaba un haz de luz sobre una superficie especial altamente reflexiva y un sensor óptico que capturaba el haz reflejado.
Hoy en día, el ratón óptico es una pequeña cámara que realiza 1500 imágenes por segundo y un software de procesamiento digital de imágenes en tiempo real.
Se incorpora un diodo emisor de luz (LED) que ilumina la superficie sobre la que se arrastra el ratón, la cámara captura imágenes de la superficie y las envía a un procesador digital de señal (DSP), operando con un rendimiento muy elevado (18 MIPS). El software que se ejecuta sobre el DSP es capaz de detectar patrones sobre cada imagen recibida estudiando como se desplazan dichos patrones en las imágenes sucesivas, el DSP averigua el desplazamiento y la velocidad. Esta información se envía al PC cientos de veces por segundo.
Las principales ventajas con respecto a los ratones convencionales es la ausencia de componentes móviles, no penetra la suciedad como sucede con los mecánicos con la consiguiente interferencia en los sensores, no requieren una superficie especial como son las alfombrillas con los ratones tradicionales.

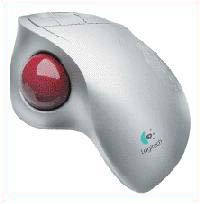
Trackball
Incorpora una bola como los ratones mecánicos, aunque también implementan la misma tecnología que los ópticos
Los mecánicos funcionan de la misma forma que los ratones convencionales y los trackball ópticos, incorporan una bola con puntos de diferente color al del fondo de la bola, para detectar el patrón de puntos y observan las variaciones de movimiento.
Inalámbrico
Este tipo de ratón lo podemos encontrar como mecánicos u ópticos, también con diferentes tecnologías de comunicación como puede ser bluetooth, wifi o infrarrojos.
Su funcionamiento, dependiendo del tipo, es similar al descrito en los ratones con cable.

Touchpath
Estos dispositivos se basan en una superficie sensible, formada por tres finas capas de diferente composición. La mas externa es una película aislante que no tiene otro cometido que proteger las otras dos capas, una de ellas llena de electrodos verticales y la otra llena de electrodos horizontales.
Los electrodos de las dos laminas están conectados a un circuito integrado capaz de detectar las coordenadas de la pulsación. Para conseguirlo, y dado que el dedo posee unas capacidades dieléctricas diferentes a las del aire, el circuito integrado detecta las variaciones del campo eléctrico y determina el lugar donde se ha producido el contacto.
Este tipo de dispositivos han sido relegados a los portátiles, ya que no consiguen la precisión de los ratones convencionales

Raton 3D
Este tipo de ratón proporciona control sobre los 6 grados de libertad de un objeto en el espacio tridimensional. Posee una bola de sensores que miden los esfuerzos de la mano sobre un elemento elástico.
Los datos actúan sobre el cambio de orientación del objeto o de la cámara
Tiene el problema de que cuando se desea trasladar un objeto, este comienza a girar a medida que avanza, aunque se puede suprimir el problema mediante filtros. Actúan en "bucle abierto", es decir, se aplican fuerzas al entorno pero no se transmiten a la mano.

Pag 37 - Ejercicio 17
- Pantallas táctiles por infrarrojos
- Pantallas táctiles resistivas
- Pantallas táctiles y touchpad capacitivos
- Pantallas táctiles de onda acústica superficial, (SAW)
Infrarrojos
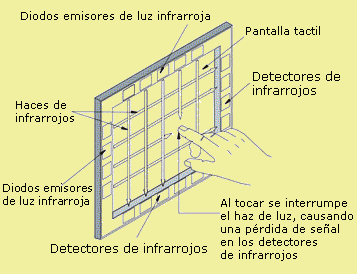
El sistema más antiguo y fácil de entender es el sistema de infrarrojos. En los bordes de la pantalla, en la carcasa de la misma, existen unos emisores y receptores de infrarrojos. En un lado de la pantalla están los emisores y en el contrario los receptores. Tenemos una matriz de rayos infrarrojos vertical y horizontal. Al pulsar con el dedo o con cualquier objeto, sobre la pantalla interrumpimos un haz infrarrojo vertical y otro horizontal. El ordenador detecta que rayos han sido interrumpidos, conoce de este modo dónde hemos pulsado y actúa en consecuencia.
Este sistema tiene la ventaja de la simplicidad y de no oscurecer la pantalla, pero tiene claras desventajas: son caras y voluminosas, muy sensibles a la suciedad y pueden detectar fácilmente falsas pulsaciones (una mosca que se pose, por ejemplo).
Pantallas táctiles resistivas
Es un tipo de pantallas táctiles muy usado. La pantalla táctil propiamente dicha está formada por dos capas de material conductor transparente, con una cierta resistencia a la corriente eléctrica, y con una separación entre las dos capas. Cuando se toca la capa exterior se produce un contacto entre las dos capas conductoras. Un sistema electrónico detecta el contacto y midiendo la resistencia puede calcular el punto de contacto.
Hay varios tipos de pantallas resistivas según el número de hilos conductores que usan, entre cuatro y ocho. Todas se basan en el mismo sistema. Veamos detenidamente el proceso.
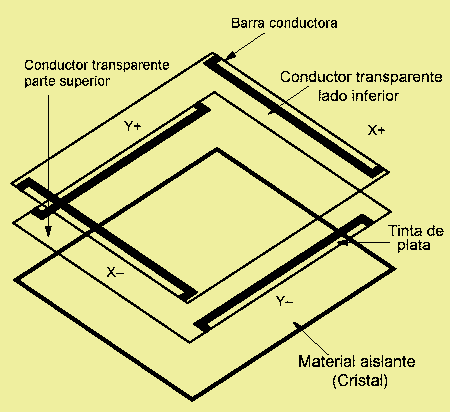
Cada capa conductora tratada con un material conductor resistivo transparente, normalmente óxido de indio y estaño (In2O3)9(SnO2), tiene una barra conductora en dos lados opuestos como en la figura. Una de las capas sirve para medir la posición en el eje X y la otra en el eje Y.
- Conectamos la entrada X+ a un convertidor analógico-digital. Ponemos una tensión entre los terminales Y+ Y- El convertidor analógico-digital digitaliza la tensión analógica generada al pulsar sobre la pantalla. Un microprocesador medirá esta tensión y calculará la coordenada "X" del punto de contacto.
- Después conectamos al convertidor analógico-digital el terminal Y+ y una tensión continua entre los terminales X+ y X- y repetimos el mismo proceso para calcular la coordenada "Y" del punto de contacto.
En algunos tipos de pantalla se puede medir además la coordenada Z o presión que se ha ejercido sobre la pantalla táctil. Para esto hay que conocer la resistencia de cada "plato". Para este tipo de medidas más complejas se necesitan más terminales para calibrar la pantalla, ya que la resistencia de los "platos" varía con la temperatura ambiente.
Las pantallas táctiles resistivas tienen la ventaja de que pueden ser usadas con cualquier objeto, un dedo, un lápiz, un dedo con guantes, etc. Son económicas, fiables y versátiles. Por el contrario al usar varias capas de material transparente sobre la propia pantalla, se pierde bastante luminosidad. Por otro lado el tratamiento conductor de la pantalla táctil es sensible a la luz ultravioleta, de tal forma que con el tiempo se degrada y pierde flexibilidad y transparencia.
"Touchpad" capacitivos
Son los utilizados normalmente en los ordenadores portátiles para suplir al ratón. El touchpad está formado por una rejilla de dos capas de tiras de electrodos, una vertical y otra horizontal, separadas por un aislante y conectadas a un sofisticado circuito. El circuito se encarga de medir la capacidad mutua entre cada electrodo vertical y cada electrodo horizontal. Un dedo situado cerca de la intersección de dos electrodos modifica la capacidad mutua 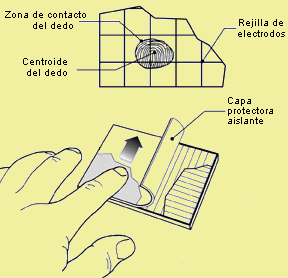 entre ellos al modificarse las propiedades dieléctricas de su entorno. El dedo tiene unas propiedades dieléctricas muy diferentes a las del aire.
entre ellos al modificarse las propiedades dieléctricas de su entorno. El dedo tiene unas propiedades dieléctricas muy diferentes a las del aire.
La posición del dedo se calcula con precisión basándose en las variaciones de la capacidad mutua en varios puntos hasta determinar el centroide de la superficie de contacto. La resolución de este sistema es impresionante, hasta 1/40 mm. Además se puede medir también la presión que se hace con el dedo. No se pueden usar lápices u otros materiales no conductores como punteros. Es muy resistente al entorno, soporta perfectamente polvo, humedad, electricidad estática, etc. Además es ligero, fino y puede ser flexible o transparente.
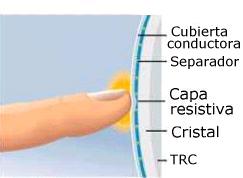
Pantallas táctiles capacitivas
En estas pantallas se añade una capa conductora al cristal del propio tubo. Se aplica una tensión en cada una de las cuatro esquinas de la pantalla. Una capa que almacena cargas se sitúa sobre el cristal del monitor. Cuando un usuario toca el monitor algunas cargas se transfieren al usuario, de tal forma que la carga en la capa capacitiva se decrementa. Este decrecimiento se mide en los circuitos situados en cada esquina del monitor. El ordenador calcula, por la diferencia de carga entre cada esquina, el sitio concreto donde se tocó y envía la información al software de control de la pantalla táctil. La principal ventaja de este sistema es que, al tener menos capas sobre el monitor, la visibilidad de la pantalla mejora y la imagen se ve más clara.
Pantallas táctiles de onda acústica superficial (SAW)
A través de la superficie del cristal se transmiten dos ondas acústicas inaudibles para el hombre. Una de las hondas se transmite horizontalmente y la otra verticalmente. Cada onda se dispersa por la superficie de la pantalla rebotando en unos reflectores acústicos.
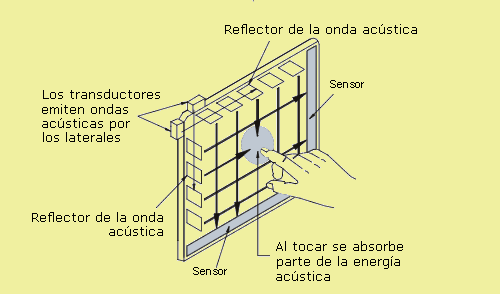
Las ondas acústicas no se transmiten de forma continua, sino por trenes de impulsos. Dos detectores reciben las ondas, uno por cada eje. Se conoce el tiempo de propagación de cada onda acústica en cada trayecto. Cuando el usuario toca con su dedo en la superficie de la pantalla, el dedo absorbe una parte de la potencia acústica, atenuando la energía de la onda. El circuito controlador mide el momento en que recibe una onda atenuada y determina las coordenadas del punto de contacto.
Además de las coordenadas X e Y, la tecnología SAW es capaz de detectar el eje Z, la profundidad, o la presión aproximada que se ha ejercido con el dedo, puesto que la atenuación será mayor cuanta más presión se ejerza.
Pag 37 - Ejercicio
0 comentarios